

Otomotif
Paten Baru Motor ‘Batman’ dari Kawasaki, Ban Bisa Miring Diagonal

JAKARTA, Perkembangan dan inovasi kendaraan tak sampai pada teknologi swa kemudi. Baru-baru ini dari laporan Bennetts, Kawasaki tengah menyiapkan sepeda motor baru dengan teknologi lengan ayun independen.
Patennya pun sudah tersebar di media sosial. Dari bentuknya mirip seperti motor kebanyakan, tapi ada penyesuaian pada sektor kaki-kaki, handle bar dan cara kendalinya.
Jadi seperti sistem suspensi independen pada SUV off-road, bannya tak hanya bergerak belok ke kanan dan kiri, melainkan juga bisa miring secara diagonal sebagai respons dari kerja sensornya. Mudah memahaminya seperti motor Batman.
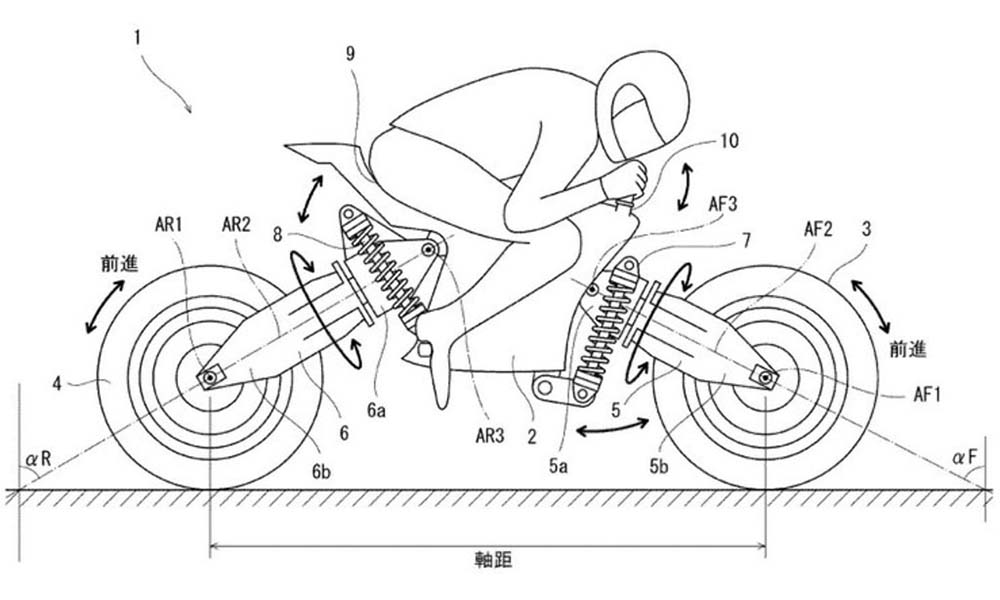
Ini membuat kendali motor tidak lagi membelokan ban depan, tetapi dengan mencondongkan badan ke samping supaya distribusi bobot membantu arah lajunya.
Maka ketika sensor mendeteksi ada pergeseran bobot, ban akan miring dengan sendirinya menyesuaikan kecepatan dan kemiringannya.
Namun tak cuma ban depan, ban belakang juga dipasangkan mekanisme supaya bisa bergerak seirama dengan ban depannya. Selebihnya mengacu gambar paten, sistem peredam kejut untuk depan dan belakangnya berupa shockbreaker dengan coil lover.

Sementara handle bar-nya bukan lagi setang horizontal. Setang sengaja dibuat U terbalik dan si pengendaranya menggenggamnya secara vertikal guna menjaga posisi duduknya tetap ideal.
Nah soal pengereman, posisi tuasnya berubah jadi tegak menyesuaikan bentuk setang barunya itu.
Bicara jantung mekanis, tidak ada mesin pembakaran internal. Guna menjawab tren global, Kawasaki bakal membenamkan baterai dan motor listrik di kedua rodanya sebagai penyuplai tenaga.
Paten ini sebenarnya merupakan bentuk restrukturisasi Kawasaki konsep J yang pada tahun 2013 sempat dipamerkan pabrikan pada gelaran Tokyo Motor Show. Lalu, kapan Kawasaki bakal merealisasikannya? Kita nantikan saja. (kum)
Editor : Cell

-

 PUPR PROV KALSEL3 hari yang lalu
PUPR PROV KALSEL3 hari yang laluHadapi Puncak Kemarau, PUPR Kalsel Amankan Ketersediaan Air Irigasi
-

 Bisnis3 hari yang lalu
Bisnis3 hari yang laluBRI KKB Expo 2026 di 131 Lokasi, Ada Promo Kredit Kendaraan 1,80%
-

 Kabupaten Banjar3 hari yang lalu
Kabupaten Banjar3 hari yang laluDampak Matinya Ikan Keramba di Karang Intan, Pemkab Banjar dan Relawan Bersihkan Aliran Sungai
-

 Kabupaten Banjar3 hari yang lalu
Kabupaten Banjar3 hari yang laluJelang Pilkades Serentak 2026, Pemkab Banjar Gelar Deklarasi Damai
-

 Kabupaten Kapuas3 hari yang lalu
Kabupaten Kapuas3 hari yang laluPeyusunan Naskah Akademik Raperda Pengendalian Minuman Beralkohol
-

 Kabupaten Kapuas3 hari yang lalu
Kabupaten Kapuas3 hari yang laluBupati Kapuas Terima Kunjungan Danlanal Banjarmasin